ABT-pagina: AchterwielBestuurde Tweewielers

|
ABT-pagina: AchterwielBestuurde Tweewielers |
|
|
Deze site is een platform voor iedereen die interesse heeft op het gebied van achterwielbestuurde mens-aangedreven voertuigen. Het is uitdrukkelijk géén éénrichtingverkeer: Iedereen die iets interessants over dit onderwerp te melden heeft, wordt verzocht om dat aan mij te melden, zodat ik het op deze site plaatsen kan. |
Regelmatig wordt geprobeerd om een goed werkende achterwielbestuurde tweewieler (ABT)
te ontwerpen.
Sommige bouwers gaan daarbij uit van het principe van 'trial and error', oftewel: 'Laten we eens wat uitproberen';
Anderen werken heel systematisch naar hun doel toe.
Waarom zou je achterwielbesturing willen, terwijl besturing via het voorwiel goed gaat?
Er kunnen veel argumenten voor zijn.
Een aanleiding om een ABT te bouwen zou kunnen zijn: Het is spannend om iets te bouwen waarover nog maar zo weinig bekend is.
Het is een uitdaging om het onbekende te verkennen.
Andere - meer technisch gemotiveerde - redenen zouden kunnen zijn:
|
Dat er met achterwielbesturing inderdaad zeer snelle voertuigen gemaakt kunnen worden,
is bewezen met het eerste vierwielige voertuig dat op het land de geluidsbarrière wist te doorbreken: De Thrust SSC (Super Sonic Car). Dit voertuig wordt aangedreven door twee straalmotoren waarin de twee niet-sturende voorwielen zijn opgenomen. Achterin de romp zitten achter elkaar twee sturende achterwielen. (Ik moet daarbij wel opmerken dat de maximale stuurhoek extreem klein is.)
Maar laat ik nu niet verder over gemotoriseerde voertuigen uitwijden, en me eerst eens beperken tot de tweewielers.
|
De eerste.
Ik heb geen idee wanneer voor het eerst iemand serieus heeft geprobeerd een werkende ABT te bouwen. In een van mijn fietsboeken vond ik een plaatje van ene M.C. Donald uit 1869. Ik heb geen idee of hij echt gebouwd is, en zo ja, of er op te rijden viel.
Ik vermoed van niet.
In hetzelfde jaar werd een patent geregistreerd van ene W.H. Laubach, die een middenbestuurde fiets had bedacht.
Omdat het zadel verbonden is met het voorstuk, zou je hem een achterwielbestuurde fiets kunnen noemen.
Detail: Let op de geveerde zadelpen!
Ook bij deze fiets heb ik ernstige twijfel over de bruikbaarheid.
De eerste ABT waarvan bij mij bekend is dat er echt op te rijden valt,
is de ABT van Fred de Weert. Hij schrijft hierover een stuk in het blad HPV-nieuws 7-2 (juli 1991).
Hij is degene die de afkorting ABT heeft bedacht.
Zijn ABT had een negatieve balhoofdhoek en een lange naloop.
Voor het sturen was een omkeermechanisme ingebouwd, zodat je bij een stuurbeweging naar rechts, inderdaad naar rechts rijdt:

|
Als je op een tweewieler rijdt, ben je eigenlijk doorlopend bezig om te zorgen dat je niet valt.
Het stuur maakt doorlopend heel kleine correcties. Je zou ook kunnen zeggen dat je doorlopend beurtelings bochten naar links en naar rechts maakt. Rechtuit rijden komt niet voor. Dat kun je ook zien aan de sporen als een fiets over een zandpad of door de sneeuw heen rijdt. Het achterwiel volgt nooit precies het spoor van het voorwiel. Conclusie: We hoeven het rechtuit rijden niet te bestuderen, want dat komt niet voor. We kijken alleen maar naar het bochten maken. Tijdens het sturen treedt er een heel aantal verschillende krachten op die allemaal op het sturende wiel inwerken. Het is belangrijk om dat te begrijpen.
Laten we eerst eens kijken naar de krachten op het stuur van een VoorwielBestuurde Tweewieler (VBT).
Neem zo'n ouderwetse stadsfiets in gedachten, die bezig is naar rechts te sturen:
|
|
We gaan eens kijken naar de besturing van een denkbeeldige tweewieler met ACHTERWIELbesturing.
Omdat daar niet één standaard ontwerp van bestaat, neem ik nu even het ontwerp van de ABT van Fred de Weert.
Ook hier bestudeer ik weer een bocht naar rechts. Ik bespreek de verschillen met de VBT. Verschillen zijn in rood afgedrukt: 
|
Analyserende hoe deze ABT verbeterd zou kunnen worden, bedacht ik het volgende:
Het grootste bezwaar van de ABT ligt in het feit dat door de lange naloop het zwaartepunt zo sterk naar de verkeerde kant
wordt getrokken tijdens een stuurbeweging.
Om dat effekt te vermijden zou het balhoofd eigenlijk achter de as van het achterwiel moeten worden geplaatst.
Maar dan kreëer je een voorloop, waardoor het wiel om wil zwaaien.
Dus hoe kun je het zwaartepunt van de fiets tijdens een stuurbeweging naar de goede kant laten verplaatsen,
terwijl je tòch geen voorloop hebt?
Dat lukt niet met een enkelvoudige draaibeweging.
Maar ik bedacht dat het met een samengestelde beweging wèl moet lukken.
Vanuit die gedachte ontwierp ik een compleet ander prototype, genaamd ABT-2 (met dank aan Jos van der Maat uit Eindhoven, voor het bouwen van het frame):

Ik had gedacht dat dit het ei van Columbus zou zijn, maar na vier maanden oefenen en van alles verbouwen
kon ik er nog geen meter op rijden.
Helaas zijn de bewegingen zo complex dat haast niet te bevatten is waaròm het niet wilde lukken.
Een aantal fundamentele problemen heb ik met mijn 'oplossing' helaas nooit op kunnen lossen. Teleurstellend maar leerzaam.
De ABT van Fred de Weert werd na mij geleend door Jurriaan Bol, die hem uitgebreid verbouwd heeft. Hij deed daarvan verslag in HPV-nieuws 11-3 (mei 1995). Een leerzaam artikel omdat er vrij systematisch naar de besturing gekeken wordt. De resultaten zijn ook bij hem uiteindelijk teleurstellend, hoe hij hem ook verbouwde.
Een foto van één versie van de verbouwde ABT staat hiernaast.
Dit is de versie die ik hierboven al besprak, nl. met het balhoofd achter het achterwiel.
Er is nog iemand die de ABT uitvoerig bestudeerd en beschreven heeft: dr. Craig J. Cornelius, wonende in Woodinville, WA, USA.
In 10 jaar tijd bouwde hij 7 verschillende prototypes, waaronder één met ongeveer hetzelfde mechanisme als mijn ABT-2.
Hij doet van zijn ervaringen een uitgebreid verslag in het blad 'Human Power'
nummer 8/2 van voorjaar 1990 (pag. 6-7,17-20).
|
Uit al deze probeersels blijkt dat het maar niet wil lukken om een goed bruikbare achterwielbestuurbare tweewieler te bouwen. Ik kan naast bovenstaande besturingsproblemen nog een paar theoretische redenen op noemen waarom dit principe onvermijdelijk altijd grote bezwaren zal blijven houden:
|

Het is overigens de vraag of we hier nog wel van een ABT kunnen spreken.
Je kunt het ook beschouwen als een VBT waarbij de berijder op het stuur zit.
In tegenstelling tot de Flevo, is deze fiets naar mijn verwachting niet met de handen los te rijden.
Ik hoop nog meer gegevens van deze opmerkelijke fiets te kunnen bemachtigen.

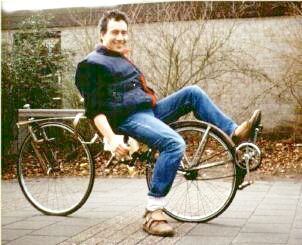
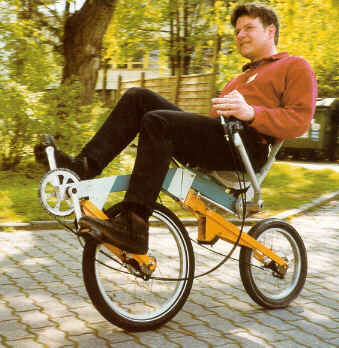
Op het 2004 DaVinci art festival reed de Kinetic Sculpture kunstenaar Duane Flatmo zonder veel moeite
op een ABT rond. Hij wordt bestuurd via staalkabels.
Feitelijk zit de rijder zo verticaal dat er maar weinig voor nodig is om hem over het voorwiel heen te laten kiepen, en feitelijk kun je deze fiets
beschouwen als een achterwielbestuurde éénwieler.
Dit brengt me tot de veronderstelling dat achterwielbesturing gemakkelijker wordt naarmate je meer rechtop zit en/of meer naar het voorwiel zit.
Dank aan Paul Hanrahan die me deze foto en bijbehorend verhaal schreef.
|
Er is nog een aantal ABT's gemaakt, en steeds weer nieuwe mensen zetten hun tanden in deze uitdaging.
Om deze pagina niet te groot te laten worden, heb ik al deze projecten op een aparte pagina gezet.
Klik HIER om die te bewonderen.
Verder worden er her en der achterwielbestuurde driewielers gebouwd.
Omdat stabiliteitsproblemen daarbij een minder belangrijke rol spelen, is een aantal van dergelijke voertuigen zelfs in serieproductie verschenen. |
Tot zover wat ik over ABT's te zeggen weet. Niet echt bemoedigend.
Ik zelf ben inmiddels gestopt met mijn ABT-plannen, en richt me nu op andere HPV's.
(Zoals je kunt zien op de andere pagina's van mijn site.)
Nog een laatst advies: Als je met het ABT-avontuur wilt beginnen: Bedenk goed waar je mee begint.
En neem zeker voor die tijd eens kontakt op met één van de makers van een ABT.
| Wil je mij bereiken, zie de gegevens op mijn persoonlijke home-page. Ook als je kommentaar hebt of iets (ervaringen of foto's) toe wilt voegen aan deze pagina, hoor ik dat graag! |
|---|
| Erik Wannee / last update: 2005-05-07 |
|